
Weed detection is a key aspect of WeedElec.
The available resources can be classified into three categories according to the type of information used :
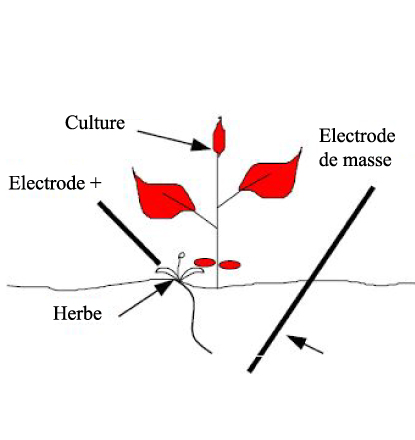
- Spatial position of seedlings:
The aim is to detect the seedlings by using the fixed distance that separates them during planting and then to improve their detection around their pre-positioning using algorithms that discriminate between the soil and the vegetation.
Most often, colour or near-infrared image segmentation techniques are used.
Once the seedling is located, everything that will be detected around it is then classified as a weed. This method is very effective in centimetric planting (laser guidance) and at a very early stage of vegetation. However, this technique, which does not allow weeds to be individualized on the row, will only be used as a first approach in WeedElec.
- Taxonomic identification by deep learning:
Image recognition algorithms are capable of identifying one plant among thousands of others with high recognition rates. The latest results in this field show recognition rates in excess of 85%(http://www.lifeclef.org/). Access to these techniques has become widely available in recent years, notably through the Pl@ntNet mobile application(www.plantnet-project.org; Joly & al., 2016). This approach, which mobilises large quantities of data, requires computing power that is difficult to mobilise on an on-board electronic solution. Knowledge distillation (Hinton & all, 2015), transfer learning (Carranza-Rojas & all, 2017) and domain adaptation (Tzeng & all, 2017) techniques will be used to overcome this problem.
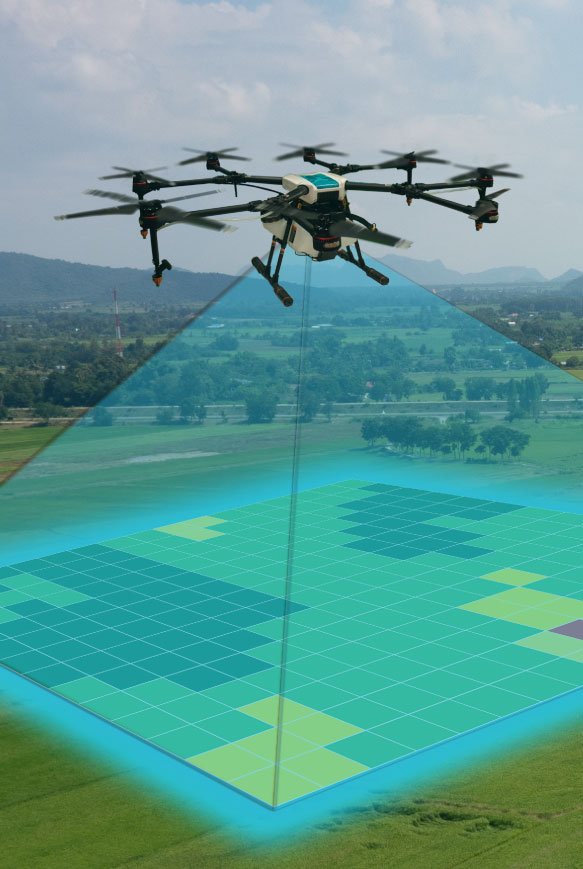
- Spectral information:
The technique of hyper-spectral imaging (one to several hundred bands, combined with chemo-metric treatments such as PLS-DA, has shown its ability to achieve effective discrimination (Hadoux & all, 2014) between weeds and crop plants. WeedElec will rely mainly on this technique to detect weeds by drone and proxy detection.